The Acrobat™
Control
The Acrobat is controlled automatically by computer and/or manual override switch. The control algorithm uses several constants which are adjustable by the operator because of different payload combinations. Changing combinations will change the hydrodynamic performance of the Acrobat system. The constants will determine the wing angles of attack required to produce the desired underwater track for any given tow speed.
The program can be set up to drive the Acrobat in the following tracks:
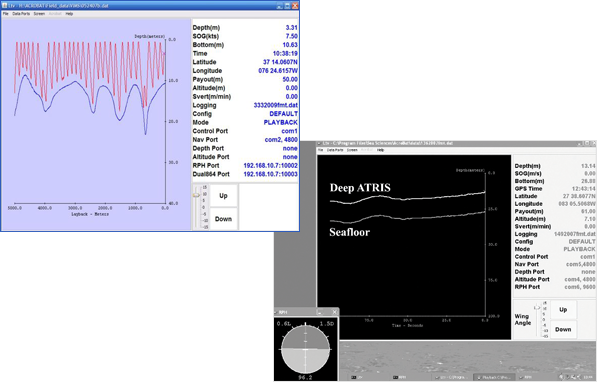
- undulate with reference to the surface, with reference to the bottom, or with reference to both surface and bottom.
- track at a constant depth, or at a constant altitude above the bottom.
There is a secondary control “Profile Generator” where the user sets up a given track, symmetrical or asymmetrical, for the Acrobat to follow. This method is very useful for shallow water research because very slow vertical speeds can achieved.
